

特斯拉執行長馬斯克 1 月底宣布,年度內完成人型機器人 Optimus Gen 3 量產線建置,目標是年底達百萬台產量。然 Optimus 高精度應用場景、成本結構、供應鏈依賴及量產進度,仍有高度不確定性,且過往產量目標多次未能兌現。故 Optimus Gen 3 雖具前瞻性與潛在規模優勢,但商業化與規模化成果,仍有待市場與時間進一步驗證。 繼續閱讀..
電影〈鬼玩人〉活斷掌重現!科學家開發可與機器手臂分離的爬行手掌 |
|
作者
Evan|發布日期
2026 年 01 月 27 日 8:10 |
|
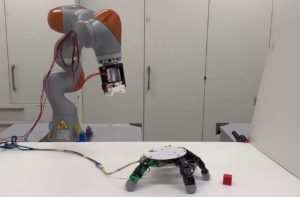
看過 1987 年好萊塢經典恐怖喜劇電影〈鬼玩人〉的人,想必難以忘記那支會四處爬行發動攻擊的活斷掌。如今科學家開發出能從機器手臂分離而出的機器手掌,該手掌能夠朝不同方向爬行並抓取物體。乍看之下,既像〈鬼玩人〉的斷掌,也像隻奇特的「六」腳蜘蛛。 繼續閱讀..
DeepMind CEO 大膽預測,AI 人型機器人兩年內就會成真 |
|
作者
TechNews 編輯台|發布日期
2026 年 01 月 21 日 12:30 |
|

Google DeepMind 共同創辦人兼執行長 Demis Hassabis 參加瑞士達沃斯 Bloomberg House 座談會,表示機器人已處於物理智慧的突破邊緣,預測 18~24 個月內,人工智慧與機器人整合、與波士頓動力等公司合作後,會出現重大突破。 繼續閱讀..
自動駕駛真的不需要人?從安全監控到法規遵循,人類仍是關鍵 |
|
作者
TechNews 編輯台|發布日期
2026 年 01 月 11 日 13:30 |
|

自動駕駛技術快速發展,車輛智慧化程度不斷提高,但人類的角色依然不可或缺。自動駕駛車輛在安全監控、遠距介入、法規遵循、維護及社會接受度等方面,仍然依賴人類參與。
年產 3 萬台!現代汽車攜手波士頓動力,Atlas 機器人 2028 年進駐產線 |
|
作者
TechNews 編輯台|發布日期
2026 年 01 月 06 日 9:10 |
|

在今年 CES 展上,波士頓動力公司(Boston Dynamics)首次展示了其最新版本的 Atlas 人型機器人,這款全電動機器人將於 2028 年開始在現代汽車(Hyundai)工廠投入使用,首個生產基地位於喬治亞州薩凡納的現代汽車集團 Metaplant America。這個創新標誌著 Atlas 從研究平台轉變為商業產品,並計劃每年生產 3 萬台。 繼續閱讀..
Google 延攬波士頓動力前技術長,DeepMind 搶攻機器人市場 |
|
作者
TechNews 編輯台|發布日期
2025 年 11 月 20 日 13:30 |
|

Google DeepMind 近日聘請波士頓動力公司(Boston Dynamics)前首席技術長亞倫·桑德斯(Aaron Saunders),以強化其在機器人領域的發展。據報導,桑德斯於本月初加入 DeepMind,擔任硬體工程副總裁,此舉被視為公司首席執行長傑米斯·哈薩比斯(Demis Hassabis)推動 Gemini 計畫的關鍵布局。哈薩比斯希望 Gemini 能成為類似 Android 的機器人操作系統,實現即插即用,適用於各類機器人配置,包括人型與非人型機器人。 繼續閱讀..
人形機器人視覺系統解析與台灣廠商機會 |
|
作者
TrendForce 集邦科技|發布日期
2024 年 12 月 12 日 7:30 |
|

人形機器人的用途將更廣泛,能以人形走入一般消費者的工作和生活場域。市場除了受惠於 AI 技術革新,感測器硬體性能提升也加速人形機器人產品開發,視覺方案更是讓機器人更能適應、回應實體世界環境的關鍵因素。機器人得到的數據品質將提高機器人的學習效率,波士頓動力開發的機器人學習框架,透過大量的模擬訓練和實物遷移學習,提升系統在複雜環境下的穩定性,為其產品服務在各種實際應用場景中的部署奠定基礎。 繼續閱讀..
美國特勤局出動機器狗保護川普,使波士頓動力成概念股 |
|
作者
Atkinson|發布日期
2024 年 11 月 12 日 12:00 |
|

外媒報導,為了保護美國總統當選人川普,相關單位找來一隻機器狗負責這項工作,進而引起矚目。而用來維護川普安全的機器狗「Spot」 ,是由現代汽車集團先前併購的機器人子公司波士頓動力公司開發的四足機器狗。
波士頓動力 Atlas 機器人「大法師」上身,自主行動能力再升級 |
|
作者
TechNews 編輯台|發布日期
2024 年 10 月 31 日 14:00 |
|

波士頓動力(Boston Dynamics)近期發布的影片展示了人形機器人 Atlas 的重大技術突破,特別是在自主操作方面取得顯著成果。這款機器人現在能夠完全自主行動,不需要人類遙控或預先編程就能執行複雜任務。 繼續閱讀..








